İki ayaklı robotun üst ve alt kısımlarında farklı hareketler kullandığınızda, iki klipteki dengenin birbirine uymadığı bir durum yaratabilirsiniz. Örneğin, üst vücut için kullanılan harekette kollar kontrolsüzce sallanıyorsa, iki ayaklı robotun dengesini korumak için kalça hareketi bir dereceye kadar bunu telafi etmelidir. Bu kol hareketinin başka bir kalça/bacak hareketiyle doğrudan karıştırılması, denge açısından büyük olasılıkla uyuşmayacaktır.
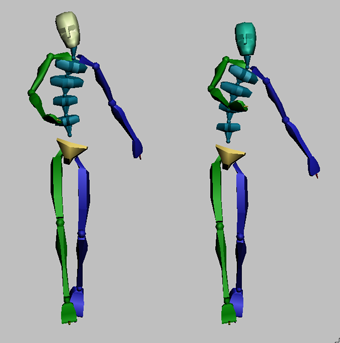
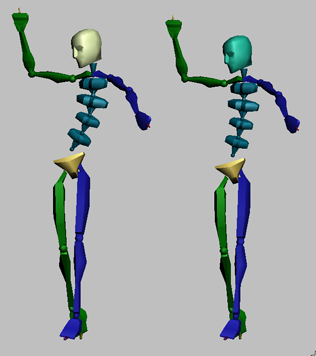
Üst ve alt vücut hareketleri aynı olan iki ayaklılar. Soldaki iki ayaklı denge telafisine sahipken, sağdaki iki ayaklı denge telafisine sahip değil.
Varsayılan olarak, Karıştırıcı, omurga ve pelvis hareketlerinde hafif değişiklikler yaparak üst ve alt vücut hareketlerindeki farklılıkları telafi eder. Örneğin, iki ayaklı robot belinden öne doğru eğilirse, ağırlık değişimini telafi etmek için pelvis hareket ettirilir ve iki ayaklı robotun dengesini korumasına yardımcı olmak için omurga dönüşü azaltılır. Denge telafisi, iki ayaklı robotun hareketinin mümkün olduğunca doğal görünmesini sağlamayı amaçlar.
Mikserde, denge izini kullanarak otomatik denge telafisinin derecesini kontrol edebilirsiniz. Miksere eklenen her iki ayaklı karakter için otomatik olarak bir denge izi oluşturulur.
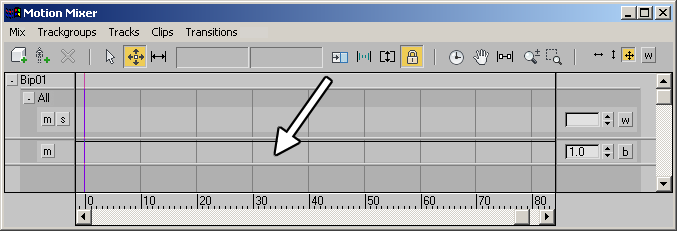
Denge parkuru
Dengeleme rayı, üst ve alt gövde ray grupları arasındaki otomatik dengeleme telafisinin derecesini ayarlamak için bir ağırlık eğrisine sahiptir. Varsayılan olarak, dengeleme rayı boyunca 1,0 ağırlık değeri maksimum telafi derecesini sağlar. Mikser tarafından gerçekleştirilen otomatik dengeleme derecesini azaltmak için ağırlık eğrisini çeşitli noktalarda azaltabilirsiniz.
Denge dengelemesinde ince ayarlar yapmak için, Karışım menüsünden erişilebilen Denge Parametreleri iletişim kutusundaki parametreleri de değiştirebilirsiniz .
Prosedürler #
Denge rayını kullanarak dengeyi ayarlamak için:
- Mikser’e bir iki ayaklı karakter ekleyin ve bu iki ayaklı karakter için en az iki parça grubu oluşturun. Mikser Parçalarını Filtreleme bölümüne bakın .
- Sadece omurga, kollar ve baş hareketlerini kullanmak için bir ses grubunu filtreleyin. Mikser Seslerini Filtreleme bölümüne bakın . Bu ses grubu üst vücut hareketlerini içerecektir.
- Farklı bir izleme grubunu filtreleyerek yalnızca bacak, pelvis ve kütle merkezi (COM) izleme gruplarına uygulayın. Bu izleme grubu alt vücut hareketini içerecektir.
- Üst vücut hareketinin yoğun olduğu bir klibi üst vücut parçasına ekleyin. Mikser’e Klip İçe Aktarma bölümüne bakın .
- Alt vücut hareketine, alt vücut hareketinden çok farklı bir hareket içeren bir klip ekleyin.
- (Denge Ağırlığı Modu) düğmesine tıklayın
 . Bu düğme, denge rayının en sağında yer almaktadır.
. Bu düğme, denge rayının en sağında yer almaktadır.
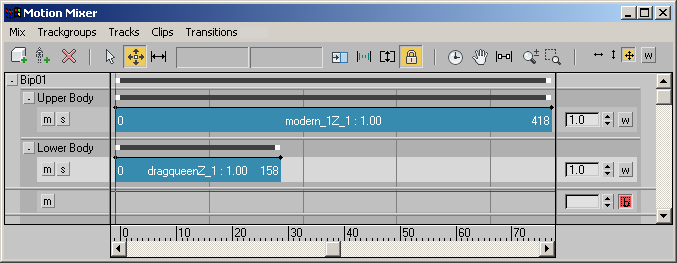
Ağırlık eğrisi, denge rayının üst kısmında görünür hale gelir.
İpucu: Ağırlık eğrisini göremiyorsanız, Mikser Tercihleri iletişim kutusunu görüntülemek için Tercihler’e tıklayın ve Ağırlık Eğrilerini etkinleştirin. - Ağırlık eğrisine düğümler ekleyin ve düğümleri ayarlayın. Düğüm ekleme ve ağırlık eğrilerini düzenleme hakkında bilgi için bkz. Parça Ağırlığını Ayarlama .
Ağırlık 0,0 olarak ayarlandığında, Mikser üst ve alt vücut hareketlerindeki farklılıkları telafi etmek için omurga ve pelvis hareketini ayarlamaz. 0,0 ile 1,0 arasındaki değerler dengeyi bir dereceye kadar ayarlar.
Pelvis ve omurgadaki denge telafisini ince ayar yapmak için:
Denge Parametreleri iletişim kutusundaki değerler, iki ayaklı yaratığın dengesinde ince ayarlamalar yapmak için kullanılabilir.
- Hareket Karıştırıcısında, iz gruplarının sol üst köşesindeki adına tıklayarak iki ayaklıyı seçin.
- Hareket Karıştırıcı menüsünden Karıştır’ı seçin.
 Denge Parametreleri.
Denge Parametreleri.
Bakiye Parametreleri iletişim kutusu açılır.
- Pelvis üzerindeki yatay denge telafisinin derecesini ayarlamak için Yanal Oran parametresini değiştirin. Daha düşük değerler pelviste daha fazla ileri/geri hareket sağlarken, daha yüksek değerler telafi etmek için daha fazla yanal hareket kullanır.
- Alt vücut hareketinden kaynaklanan omurga rotasyonunun üst vücuda ne kadar yayılacağını ayarlamak için Yayılma parametresini değiştirin. Daha yüksek değerler, omurga bağlantılarını kütle merkezini ve pelvis hareketini daha iyi takip edecek şekilde döndürür.
Üst ve alt vücut hareketleri aynı olan iki ayaklı robotlar. Soldaki robotun Yayılım değeri 0.0, sağdaki robotun ise 1.0 olarak ayarlanmıştır.



