Bu güncellemenin araç seti, iki ayaklı bir yaratığın uzuvları için bükülme pozları oluşturmanıza ve düzenlemenize olanak tanır.
- İki ayaklı bir karakter seçin. >
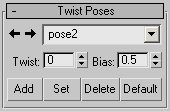
 Hareket paneli > Dönme Pozları açılır menüsü
Hareket paneli > Dönme Pozları açılır menüsü
İsterseniz açılır menüdeki önceden tanımlanmış pozları (bunları değiştirebilir ve yeniden adlandırabilirsiniz) kullanabilir veya kendi pozlarınızı oluşturabilirsiniz. Yeni bir poz eklediğinizde, seçilen uzvun göreceli yönelimi ile açılır menüdeki 0 (yani bükülme yok) değerindeki Bükülme değeri arasında bir referans oluşturursunuz. Döndürülmüş bir uzuv için birden fazla referans poz ayarlandığında, uzvun bükülmesi en yakın poza göre hesaplanır.
Twist Poses eklentisi, yalnızca üst kollar ve uyluklar gibi üç serbestlik derecesine (DOF) sahip uzuvları etkiler, çünkü bu uzuvların dönme bağlantılarını döndürerek kontrol edebilirsiniz. İki serbestlik derecesine sahip uzuvlar (örneğin ön kollar ve baldırlar) ise farklıdır, çünkü bu uzuvların dönme bağlantılarını yalnızca alt uzuvlarını döndürerek kontrol edebilirsiniz.
Üst kol kendi kendine dönebilirken, ön kolun dönmesi için bileğin de devreye girmesi gerekir.
Prosedürler #
Örnek: Bükülme Pozları Eklemek ve Düzenlemek İçin:
Bu prosedür, iki ayaklı uzuvlara bükme bağlantıları ekleme konseptini dikkate alır ve temel pozları ayarlamak için Bükme Pozları (Twist Poses) paketindeki araçları kullanmaya odaklanır.
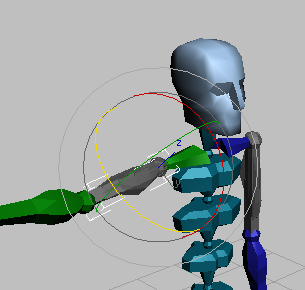
- Her üst kolunda beş adet bükümlü bağlantı bulunan iki ayaklı bir robot hazırlayın.
İpucu: İç kısımdaki bükümlü bağlantıları daha iyi ayırt etmek için iki ayaklı yaratığın uzuvlarında Şeffaf özelliğini kullanabilirsiniz .
- Çıkış yapın
 (Şekil Modu) ve ardından Bükülme Pozları açılır menüsünü genişletin.
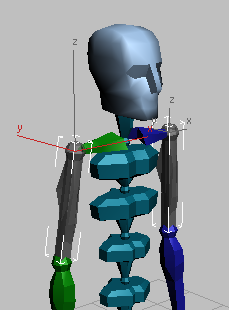
(Şekil Modu) ve ardından Bükülme Pozları açılır menüsünü genişletin.  Sağ üst kolu seçin.
Sağ üst kolu seçin.
Üç serbestlik dereceli bir uzuv seçtiğiniz için hareket kontrol mekanizmaları etkinleştirildi.
- Farklı poz ön ayarları arasında geçiş yapmak için
 (Önceki Tuş) ve (Sonraki Tuş) tuşlarını kullanın .
(Önceki Tuş) ve (Sonraki Tuş) tuşlarını kullanın . İpucu: Bu ön ayarları genellikle uzuvlarınızı pozlandırmak için başlangıç noktası olarak kullanabilirsiniz.
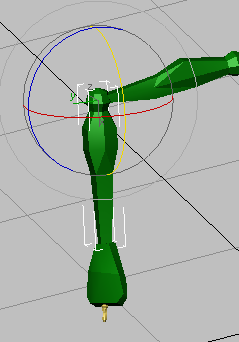
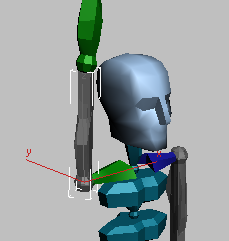
İpucu: Bu ön ayarları genellikle uzuvlarınızı pozlandırmak için başlangıç noktası olarak kullanabilirsiniz. - Açılır listeden pose6’yı seçin .
İki ayaklı yaratığın kolu yukarı doğru uzanıyor ve hafifçe kıvrılıyor.
- Ayarla’ya tıklayın.
Bu, üst kolun büküm bağlantılarına 0 büküm değerini atar.
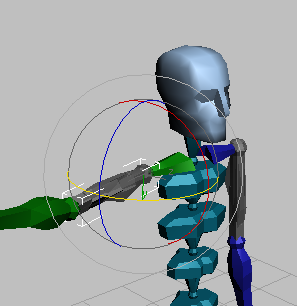
Not: Buruş değişikliği her zaman her iki tarafta da (bu durumda, her iki üst kolda da) yansıtılır.  Üst kolu, Y ekseni etrafında yerel olarak döndürerek yana doğru uzatın.
Üst kolu, Y ekseni etrafında yerel olarak döndürerek yana doğru uzatın.
- Yeni bir poz oluşturmak için Ekle’ye tıklayın. Adını Kol Yanda olarak değiştirin .
Bu yeni pozisyon, büküm bağlantılarının mevcut Büküm değerini sıfırlar.
- Üst kolu X ekseni etrafında yerel olarak döndürün.
Üst koldaki bükülme, uzuvun kaydedilmiş pozlara olan yakınlığına göre hesaplanır.
Üst kolu döndürerek bağlantı noktalarının doğruluğunu kontrol edin.
Arayüz #
- Önceki/Sonraki Tuşu
-
Dönme pozları listesinde gezinir ve seçim yapar.
- Bükülme Pozları Listesi
-
İki ayaklı yaratığın seçili uzvuna uygulanacak önceden ayarlanmış veya kaydedilmiş bir pozu seçmenizi sağlar. Varsayılan olarak, her üç serbestlik dereceli uzuv için beş bükme pozu mevcuttur: Yukarı, öne, yana, aşağı ve geriye. Mevcut bükme pozunu da yeniden adlandırabilirsiniz.
- Bükülme
-
Seçilen uzuvya bağlı bükme bağlantılarına uygulanan bükme dönüş miktarını (derece cinsinden) ayarlar. Karşı taraftaki bükme bağlantıları da bundan etkilenir. Varsayılan değer = 0. Aralık = -180 ile 180 arası.
Not: Bükme değerini değiştirmek, mevcut uzvun yönünü otomatik olarak aktif bükme pozisyonuna sıfırlar. - Ön yargı
-
Dönme hareketinin büküm bağlantıları boyunca dağılımını ayarlar. 1.0 ayarı bükümü üst bağlantıya doğru yoğunlaştırırken, 0.0 ayarı ise alt bağlantıya doğru yoğunlaştırır. Varsayılan ayar 0.5’tir ve dönüşü bağlantılar boyunca eşit olarak dağıtır. Karşı taraftaki büküm bağlantıları da bundan etkilenir.
Not: Bias değerini değiştirmek, mevcut uzvun yönünü otomatik olarak aktif bükme pozisyonuna sıfırlar.Not: İki serbestlik dereceli uzuvlar için de bir Sapma değeri ayarlayabilirsiniz. - Eklemek
-
Seçilen uzvun yönüne bağlı olarak yeni bir bükme pozisyonu oluşturur ve Bükme ile Sapma değerlerini varsayılan değerlerine sıfırlar.
Not: Bir uzuv için yeni bir poz eklemek, bu pozun otomatik olarak karşı taraftaki uzuv için de kullanılabilir olmasını sağlar. - Ayarlamak
-
Mevcut Twist ve Bias değerleriyle aktif bükme pozunu günceller.
- Silmek
-
Mevcut dönme pozunu kaldırır.
- Varsayılan
-
Üç serbestlik dereceli tüm uzuvların tüm bükülme pozlarını beş varsayılan önceden ayarlanmış pozla değiştirir.



