Euler XYZ Döndürme kontrolcüsü, X, Y ve Z eksenlerinin her biri etrafındaki döndürme açısını belirtmek için ayrı, tek değerli kayan noktalı kontrolcüleri birleştiren bileşik bir kontrolcüdür. Euler XYZ, kuaternion döndürme kadar (TCB Döndürme kontrolcüsü tarafından kullanılan) pürüzsüz değildir, ancak döndürme fonksiyon eğrilerini düzenlemek için kullanabileceğiniz tek döndürme türüdür.
- Görünüm alanında bir nesne seçin >
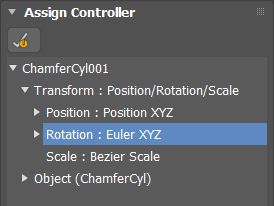
 Hareket paneli > Denetleyici Ata açılır menüsü > Döndürme izini seçin. Euler XYZ varsayılan denetleyici olarak atanmıştır.
Hareket paneli > Denetleyici Ata açılır menüsü > Döndürme izini seçin. Euler XYZ varsayılan denetleyici olarak atanmıştır.
Euler XYZ Döndürme kontrolcüsü, konum, döndürme ve ölçek dönüşümlerinin X, Y ve Z bileşenlerine ayrı ayrı izler atar. Ancak, kontrolcü varsayılan olarak üç anahtar (her eksen için bir tane) atar. Bunu önlemek için, açık eksen anahtarları oluşturmak üzere Kullanıcı Arayüzünü Özelleştir eylemlerini kullanabilirsiniz. Bunlar Ana Kullanıcı Arayüzü grubunda mevcuttur. Temel Araçlar kategorisini ayarlayın.
Temel Araçlar kategorisini ayarlayın.
Gimbal referans koordinat sistemi, bu kontrol cihazıyla kullanılmak üzere tasarlanmıştır. Diğer koordinat sistemlerinde, tek bir eksen etrafında döndürme her zaman en az iki izi değiştirir. Gimbal dönüşüyle, tek bir eksen etrafında döndürme yalnızca bir izi değiştirir, bu da fonksiyon eğrilerini düzenlemeyi kolaylaştırır.
Euler ve TCB Rotasyonu #
Euler döndürme, 3ds Max 5 öncesinde varsayılan döndürme kontrolcüsü olan TCB Döndürme kontrolcüsüne göre çeşitli avantajlar sunar. Euler döndürme, TCB’nin aksine fonksiyon eğrileri sağlar. Euler döndürme, Eğri Düzenleyici’de manipüle edilebilen üç ayrı eğriye izin verir. TCB döndürmeleri yalnızca gerilim, süreklilik ve sapma ayarlarıyla kontrol edilebilir, bu da X, Y ve Z döndürmelerini bağımsız olarak anahtar karelerle kontrol etmeyi ve manipüle etmeyi zorlaştırır.
Öte yandan, TCB döndürme özelliği, belirli bir anahtar karede 180 dereceden daha büyük döndürmelere olanak tanır. Döndürme Artırma seçeneğini açarsanız , 360 dereceden daha büyük döndürme değerleri elde edebilirsiniz.
Euler Dönüşü ve Dalga Formu Kayan Nokta Kontrol Cihazı #
Euler Döndürme kontrolcüsü radyan kullandığı için, diğer kontrolcüler Euler eksenlerine uygulandığında birim ayarlamaları yapılmalıdır. Örneğin, Dalga Formu Kayan Nokta kontrolcüsünün Karakteristik Grafikte varsayılan genliği 100’dür. Dalga Formu Kayan Nokta kontrolcüsü bir Euler eksenine uygulandığında, varsayılan genlik 100 radyan olur. Bu, Genlik ayarını 5729.598’e (100 radyandaki derece sayısı) ayarlar.
Euler Dönüşü ve Gürültü Yüzdürme Kontrol Cihazı #
Bir Euler eksenine Gürültü Kayması kontrolörü uygulandığında, varsayılan Güç ayarı 286.479 veya derece cinsinden 10 radyanın %50’sidir (maksimum sapma).
Euler Döndürme ve MIDI Hareket Yakalama Kontrol Cihazı #
MIDI Hareket Yakalama kontrol cihazı uygulandığında, Parametre Ölçeklendirmesi radyan cinsinden alınır, böylece 1.0 olan Maksimum varsayılan ayar, 57.2958 derecelik bir üst sınırla sonuçlanır.
Prosedürler #
Örnek: Euler XYZ Dönüşünü kullanmak için:
- Bir kutu oluşturun.
- Hareket paneline gidin ve atanan dönüş kontrolcüsünün Euler XYZ olduğundan emin olun. Değilse, Kontrolcü Ata açılır listesinde Dönüş izini vurgulayın,
 (Kontrolcü Ata) öğesine tıklayın ve ardından Kontrolcü Ata iletişim kutusunda Euler XYZ’yi seçin. Tamam’a tıklayın.
(Kontrolcü Ata) öğesine tıklayın ve ardından Kontrolcü Ata iletişim kutusunda Euler XYZ’yi seçin. Tamam’a tıklayın. - Açın
 .
. - PRS Parametreleri açılır menüsünün en altında, Döndürme seçeneğine tıklayın.
- Euler Parametreleri açılır menüsünde, gerekirse X dönüş ekseni düğmesine tıklayın.
- PRS Parametreleri açılır menüsünün Anahtar Oluştur grubunda, Döndürme seçeneğine tıklayın.
3ds Max, dönme hareketine dayalı bir anahtar kare oluşturur.
- Zaman kaydırıcısını 50. kareye getirin.
- Yine, PRS Parametreleri açılır menüsünün Anahtar Oluştur grubunda, Döndürme’ye tıklayın.
- Temel Bilgiler (Temel) açılır menüsünde, Değer alanına 500 girin.
- Euler Parametreleri açılır menüsünde, Z dönüş ekseni düğmesine tıklayın ve ardından Temel Bilgi (Temel) açılır menüsünün Değer alanına 90 girin.
 Animasyonu oynatın. Kutu X ekseni etrafında 500 derece ve Z ekseni etrafında 90 derece döner. Bu durumda önce X ekseni dönüşü, sonra Z ekseni dönüşü gerçekleşir.
Animasyonu oynatın. Kutu X ekseni etrafında 500 derece ve Z ekseni etrafında 90 derece döner. Bu durumda önce X ekseni dönüşü, sonra Z ekseni dönüşü gerçekleşir.
Yerel dönüş kontrolü için Euler XYZ’yi Liste denetleyicileriyle kullanmak için:
3ds Max’in önceki sürümlerinde bulunan yerel Euler döndürme denetleyicisini, bir liste denetleyicisini bir Euler XYZ döndürme denetleyicisiyle birleştirerek taklit edebilirsiniz.
- Yerel döndürme kontrolü uygulamak istediğiniz nesneyi seçin. Örneğin, bir çaydanlık ve bir kukla oluşturun.
- Kuklayı canlandırın.
- Hareket Kontrol Panelini açın .
- “Denetleyici Ata” açılır menüsünde, “Döndürme” dönüşümünü seçin, ardından “Telefona Bak” denetleyicisi atayın ve “Telefona Bak” hedefi olarak kukla nesneyi atayın.
Artık kukla aracılığıyla dönüşü kontrol edilen bir nesneniz var.
- Pencerede Döndürme: Bakma denetleyicisi seçiliyken, tekrar (Denetim Masası Ata) seçeneğine tıklayın ve Döndürme Listesi’ni seçin.
Şimdi, LookAt kısıtlamasının listenin ilk döndürme denetleyicisi olarak uygulandığı bir liste denetleyicisi var.
- Pencerede aşağı kaydırın ve “Mevcut” etiketli girişi seçin, ardından tekrar “Denetim Masası Ata”ya tıklayın.
- Euler XYZ’yi seçin.
Artık ilk kontrolcü olarak LookAt Rotation ve ikinci kontrolcü olarak Euler XYZ içeren bir liste kontrolcüsüne sahipsiniz.
- Döndürme Listesi açılır menüsünde, Katmanlar penceresinde Euler XYZ’yi vurgulayın ve ardından Etkin Olarak Ayarla’ya tıklayın.
- Euler Parametreleri açılır menüsünde Eksen Sırasını ZYX olarak değiştirin.
Artık LookAt dönüş kontrolünden bağımsız olarak dönüşü canlandırabilirsiniz. Bu sayede, 4 ve önceki sürümlerde bulunan Yerel Euler denetleyicisiyle aynı şekilde davranması gerekir.
Arayüz #
Euler parametreleri Hareket panelinde görüntülenir.
PRS Parametreleri açılır menüsünde Döndürme seçeneği seçildiğinde Euler parametreleri açılır menüsü görüntülenir .
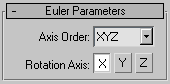
- Eksen Sırası
-
Dönme işlemlerinin hesaplanma sırasını seçer. Varsayılan sıra X, Y, Z’dir; burada önce X ekseni döndürülür.
- X
-
X ekseni dönüş açısı için kontrol cihazı özelliklerini görüntüler.
- VE
-
Y ekseni dönüş açısı için kontrol cihazı özelliklerini görüntüler.
- İLE
-
Z ekseni dönüş açısı için kontrol cihazı özelliklerini görüntüler.
Her eksen, float veri tipini kullanan kendi bağımsız denetleyicisini kullanır. Örneğin, X ve Y dönüş eksenleri Bezier Float denetleyicilerini kullanabilirken, Z dönüş ekseni Noise Float denetleyicisini kullanabilir.



