CAT’teki ters kinematik sisteminin ( FK güdümlü IK olarak adlandırılır ) amacı, IK ve FK hakkında fazla düşünmenize gerek kalmadan karakter iskeletinizle sezgisel bir şekilde etkileşim kurmanızı sağlamaktır.
Sistem, bir uzvun mevcut FK dönüşlerini alır ve ardından bunları IK hedefine uyarlar. Bu esnek yaklaşım, diğer IK sistemlerinde olduğu gibi yalnızca bir eksende değil, herhangi bir eksende dönen IK zincirlerini de destekler. Ayrıca, sistemin nasıl çalıştığını özelleştirmek için kısıtlamalar gibi özel bileşenler eklemek de kolaydır.
IK Zincirinin Yapılandırılması #
Ters kinematik (IK) zincirindeki kemikleri ayarlamak için, kemikleri istediğiniz konfigürasyona hareket ettirip döndürmeniz yeterlidir. Kemikleri döndürebileceğiniz yönde herhangi bir sınırlama yoktur.
IK çözümünün FK çözümünden türetilmiş olması, Kurulum modunda FK ve IK yapılandırmalarını mümkün olduğunca birbirine yakın tutmanın önemli olduğu anlamına gelir. İyi bir yöntem, IK’da uzvu düzenlemeye başlamadan önce “FK’yı IK ile Eşleştir” düğmesine tıklamaktır. Örümcek gibi karmaşık uzuvlar için, uzvu FK’da konumlandırmanız ve IK’yı yalnızca işiniz bittiğinde açmanız önerilir.
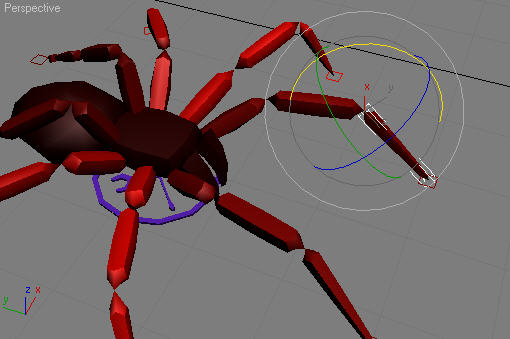
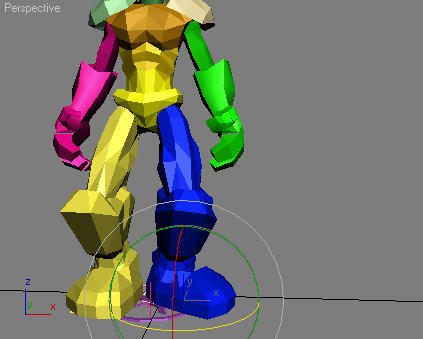
Karmaşık uzuvlarda, FK’deki kemikleri ayak platformunun üzerine oturacak şekilde döndürün.
Uzuv kemiklerini herhangi bir eksende döndürebildiğiniz için, silahşör kovboylar için çarpık bacaklı IK zincirleri oluşturabilirsiniz.
IK ve FK’da Çalışmak Arasındaki Fark #
CAT’te IK ve FK arasındaki fark önemsizdir. Bir uzvun manipüle edildiğinde gösterdiği davranış, IK veya FK’da büyük ölçüde aynıdır. Fark şudur ki, IK’da uzvun alt ucu, örneğin avuç içi, her zaman IK hedefini takip etmeye çalışır. FK’da uzvun böyle bir kısıtlaması yoktur.
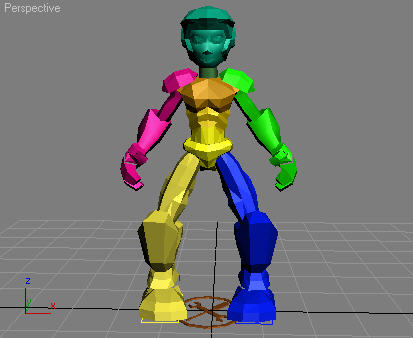
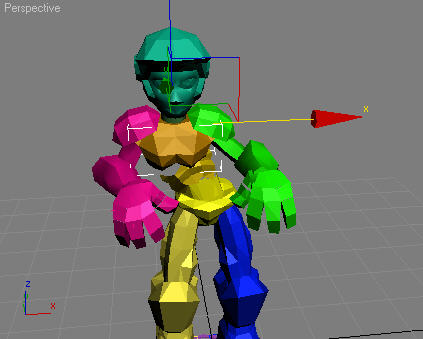
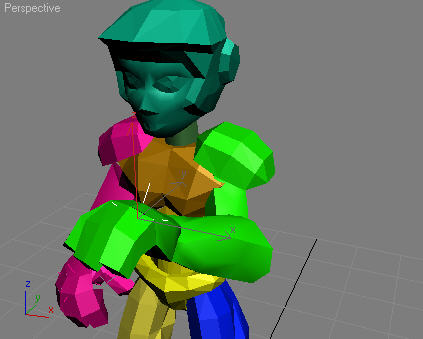
FK pozisyonunda kollar varken göğüs kafesi yanlara doğru hareket ettirildiğinde, kollar da göğüs kafesiyle birlikte hareket eder.
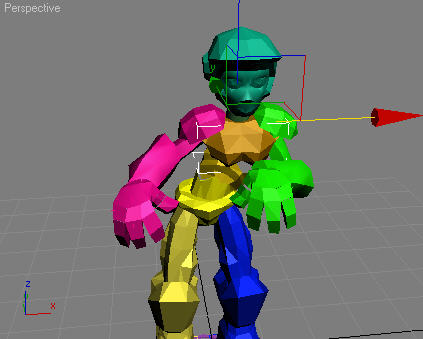
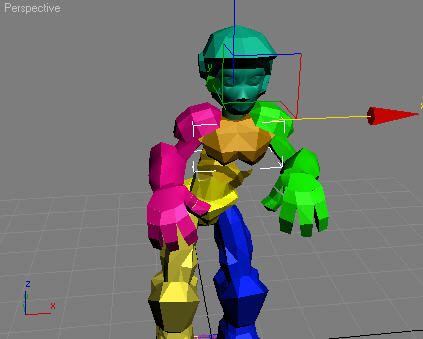
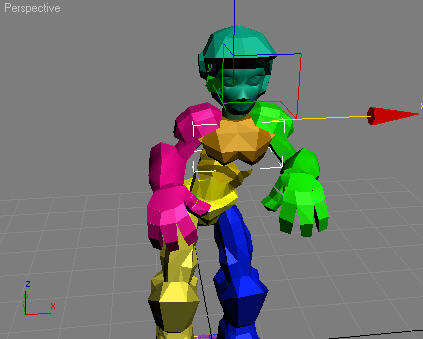
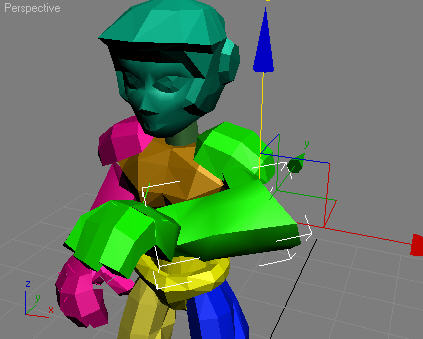
IK’da kollar sabit kalırken, göğüs kafesi dönüşüme uğrar.
IK’yı Ne Zaman Kullanmalı? #
Bir uzvun sabit bir son pozisyona sahip olması gerektiğinde ters kinematik (IK) kullanın. Bunun en yaygın örneği, bacak kemiklerini döndürürken ayakların yere sabitlenmesi ve kaymaması gereken yürüyüş animasyonudur. Diğer örnekler arasında silah veya direksiyon gibi nesneleri tutan kollar yer alır.
CAT’in ters kinematik (IK) sisteminin nasıl davranmasını bekleyebiliriz? #
IK hedefinin hareket ettirilmesi #
Herhangi bir IK sisteminden beklendiği gibi, IK hedefini hareket ettirdiğinizde, IK zinciri orijinal konfigürasyonunu mümkün olduğunca korur.
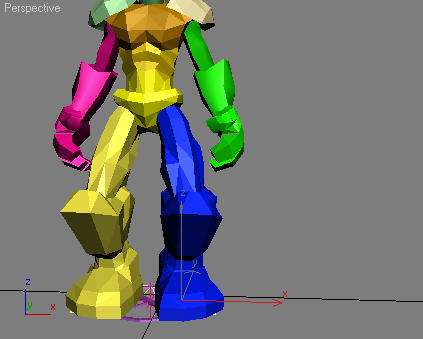
Bacağın ters kinematik (IK) hedefi uzaklaştıkça, uzuv mümkün olduğunca temel bacak pozisyonunu korur.
IK hedefinin döndürülmesi #
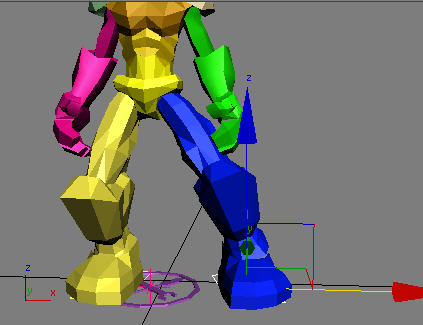
IK hedefinin döndürülmesinin uzuvun dönmesine neden olmadığını öğrenince şaşırabilirsiniz. İlk bakışta bu garip görünse de, aslında CAT’in IK sistemini daha esnek hale getiriyor ve bir sorun teşkil etmiyor.
Ters kinematik (IK) hedefi döndürüldüğünde sadece ayak bileği döner. Uzuvun geri kalanı etkilenmez.
Bununla başa çıkmanın basit bir yolu, üst bacak kemiğini ayrı olarak döndürmektir (aşağıdaki “Animasyon Sırasında Uzuv Kemik Döndürmelerini Ayarlama” bölümüne bakın). Bir diğer alternatif ise üst bacak döndürmelerini Ayak Platformuna bağlamaktır.
Animasyon Sırasında Uzuv Kemiklerinin Dönme Hareketlerini Ayarlamak #
Ters kinematik (IK) hedefi hareket ettirirken, IK zincirindeki kemiklerin tam yönünü ayarlamak isteyebilirsiniz. CAT ile , gerektiği gibi kemikleri görüntü alanında döndürmeniz yeterlidir.
El yana kaydırıldı ama dirsek çok aşağıda, bu yüzden dirseği yukarı çekiyoruz .
Hedef Hizalama #
Hedef Hizalama değeri, avuç içindeki IK hedefinin dönüşlerini devralıp devralmayacağını kontrol etmenizi sağlar.
Hedef Hizalama değeri 0.0 olarak ayarlandığında, avuç içi IK hedefiyle birlikte hareket eder ancak uzuvdaki son kemiğe (insanda önkol) hizalı kalır.



