FootPlatform, ayaklar için ters kinematik (IK) hedefidir. Hareketi, bacakların animasyonu için kritik öneme sahiptir.
- CATMotion Düzenleyici >
 Hiyerarşi paneli > FootPlatform’un ait olduğu HubGroup hiyerarşisini genişletin. > Düzenlemek istediğiniz kontrol cihazına tıklayın.
Hiyerarşi paneli > FootPlatform’un ait olduğu HubGroup hiyerarşisini genişletin. > Düzenlemek istediğiniz kontrol cihazına tıklayın.
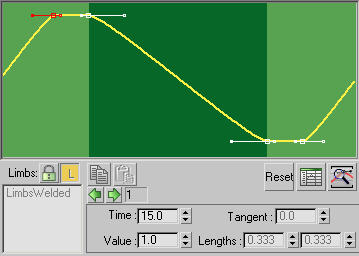
RollPivotPos #
CATRig’in FootPlatform’u, ayağın her zaman doğru nokta etrafında dönmesini sağlamak için animasyonlu bir pivot pozisyonuna sahiptir. RollPivotPos kontrolcüsü, FootPlatform’un X ekseni boyunca (veya bir taraftan diğerine) pivotun konumunu belirler.
1.0 değeri ayağın dış kısmını, 0.0 değeri ise ayak tabanının iç kısmını temsil eder.
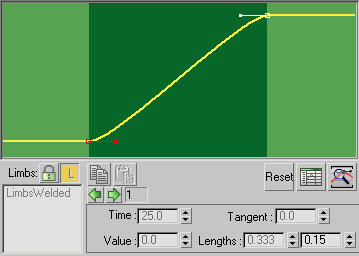
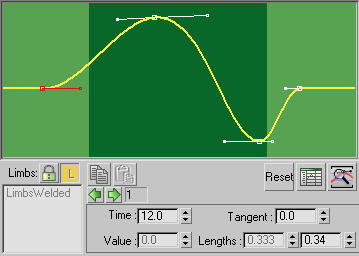
Rulo #
Roll kontrol ünitesi, FootPlatform’un uzunluğu boyunca dönüşünü kontrol eder.
Aşağıdaki çizimde, yuvarlanma hareketi ayak yerden kalkmadan önce başlar ve ayak yere değdikten sonra sona erer. Bu tipik bir senaryodur.
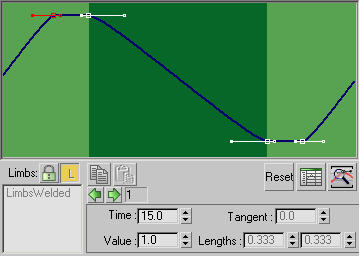
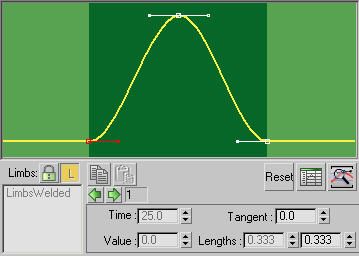
EğimPivotPozisyon #
FootPlatform, ayağın her zaman istenen nokta etrafında dönmesini sağlamak için animasyonlu bir pivot pozisyonuna sahiptir. PitchPivotPos, pivotun FootPlatform’un Y ekseni boyunca, yani uzunluğu boyunca konumunu kontrol eder.
0.0 değeri, dönme noktasını ayak platformunun topuğuna, 1.0 değeri ise ayak parmağına konumlandırır.
Bir insan için bu ayar, aşağıdaki resimde gösterildiği gibi, tipik olarak kaldırma için ayak parmağı (1.0) ve yere basma için topuk (0.0) arasında hareket eder.
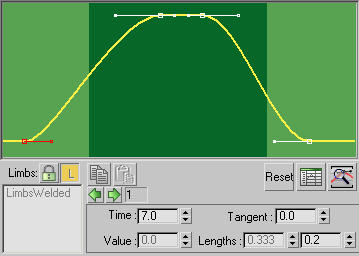
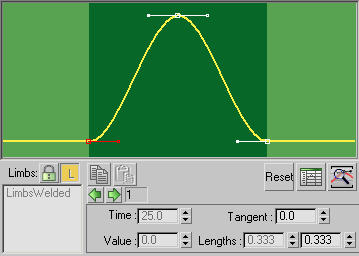
Saha #
Standart Pitch kontrol cihazında olduğu gibi, FootPlatform Pitch de FootPlatform’un uzunluğu boyunca (Y ekseni) açısını kontrol eder. Aşağıdaki resimde gösterildiği gibi, ayağın yerden kalktığı ve yere çarptığı andaki açıyı kontrol etmek için kullanılır.
Ayak İtme #
FootPush, yürüme döngüsü sırasında FootPlatform’u ileri doğru fırlatmanızı sağlayan, Y ekseni boyunca döngüsel bir konum kaymasıdır.
Sapmak #
Swerve kontrol ünitesi aslında WeightShift kontrol ünitesiyle aynıdır. Ayak platformunun yanlara doğru (X ekseni) konum döngüsünü kontrol eder.
StepShape #
StepShape kontrol ünitesi, FootPlatform’un havada hareket ederkenki hızını kontrol eder. Başka bir deyişle, FootPlatform’un hareketinin yavaşlığını ve yavaşlamasını kontrol eder.